在工业控制领域,产品竞争力正由单一性能指标,转向对效率、精度、可靠性与智能化的系统级综合考量。成本控制与小型化仍是长期基础,而高效节能、微秒级响应、高可靠运行及网络化能力,正逐步成为PLC、多类型电机、伺服系统与机器人等核心应用的关键发展方向。
围绕应用创新,纳芯微在工业控制场景中,提供覆盖信号感知、处理与接口、电源管理、驱动、采样及控制的全链路产品解决方案,直面系统在实时性、精度、能效与可靠性等方面的核心挑战。下文将结合具体应用场景,进一步展开纳芯微如何以场景定义芯片,支撑工业控制系统持续升级。
PLC 与信号采集 高集成接口支撑多样化系统需求
PLC 是工业控制系统中的集中信号处理单元,负责连接现场传感器、执行器与控制网络,涉及模拟量、数字量及多种通信接口。随着系统规模扩大与功能集成度提升,PLC 对接口密度、隔离性能以及信号处理一致性提出了更高要求。
在 PLC 相关应用中,纳芯微的优势体现在以下方面:
一是同时覆盖模拟与数字控制,能够满足多类型信号采集与处理需求;
二是数字隔离产品在集成度与速率性能上显著优于传统光耦方案;
三是数字输出芯片具备更高集成度,并可适配不同类型负载。
在一些PLC等小型化的场景中,纳芯微推出了基于电容隔离技术的数字输入隔离器NSI860x,包括四通道的NSI8604和八通道的NSI8608,具有高集成度和高稳定性的特点。它将数字输入/输出融为一体,可接收-60V至60V数字输入信号;兼容光耦的电流输入形式,不需要现场侧电源供电,并可提供隔离的数字输出。
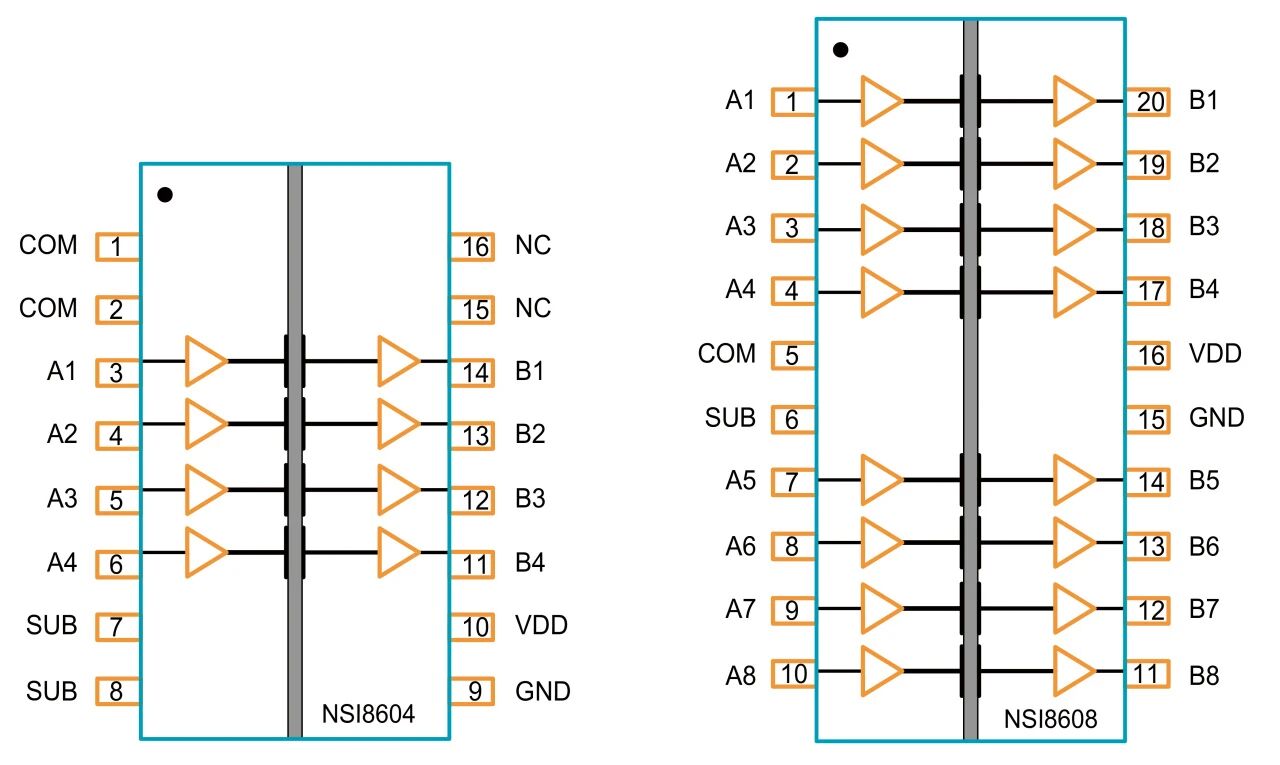
NSI8604:SSOP16(左) NSI8608:SSOP20(右)
此外,针对现在许多系统中仍在使用很多小光耦的情况,纳芯微提供的NSI721x/722x系列隔离器可以对高速光耦进行快速原位替代,这些器件具有CMTI大于100kV/μs、绝缘材料CTI水平大于600V、温度范围更宽的优势,能够优化成本、可靠性和速率,提升系统整体性能。其封装包括SO-5、SOWW8、SOP8等常见封装类型,支持4mm、8mm、15mm爬电距离。
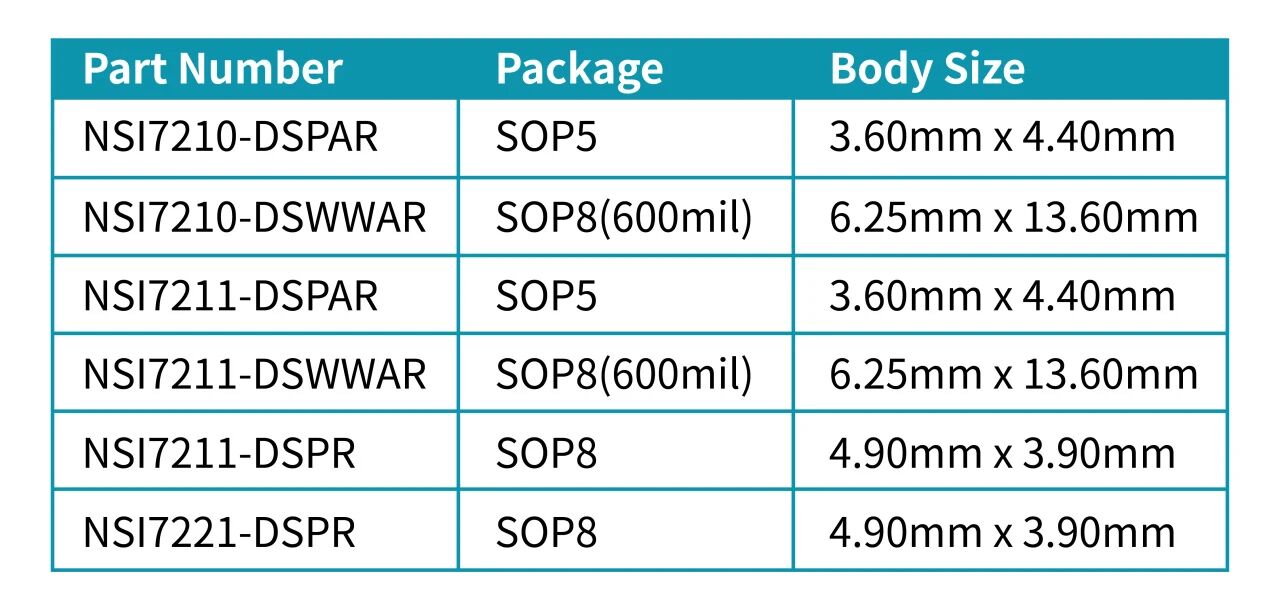
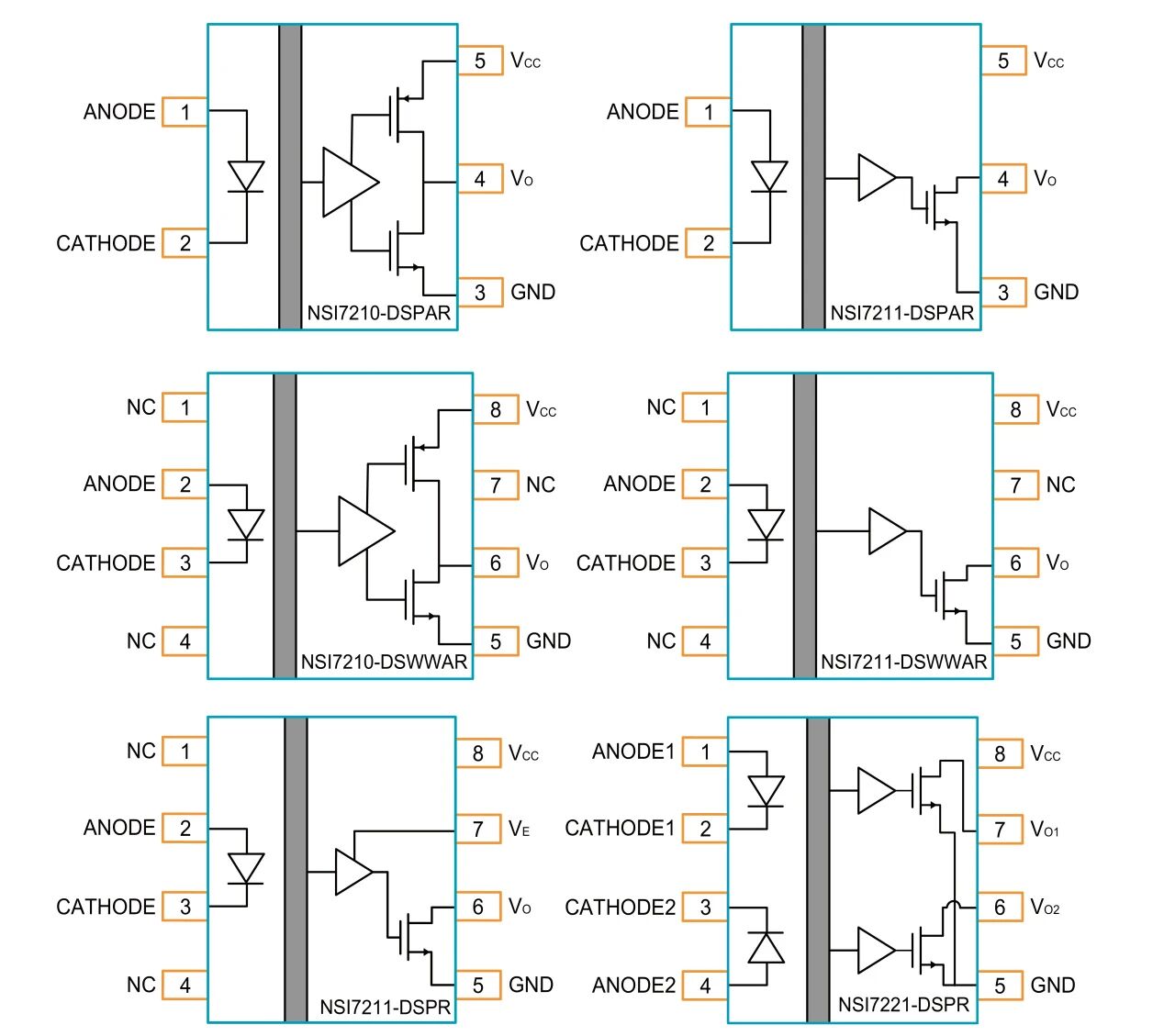
NSI72xx选型表和功能框图
针对系统毫秒级甚至微妙级数据处理与响应需求,纳芯微推出实时控制MCU NS800RT7377D。该芯片采用双Cortex®-M7内核@400MHz,集成丰富外设与保护功能,配备40路PWM(含16路124ps高精度HRPWM、24路增强型EPWM),以超精细功率控制显著提升系统控制精度与稳定性,适配高精度应用。
多类型电机控制中 芯片适配与系统协同
在电机控制的多样化应用方面,工业控制系统中常见的步进电机、变频器和伺服电机在控制方式和应用需求上各不相同。针对不同类型电机的特点,纳芯微相关产品可在相应的控制场景中发挥作用,满足多样化的应用需求。
步进电机 以专用驱动实现平稳、低噪与可靠运行
步进电机是一种将 MCU 输出的电脉冲信号转换为角位移或线位移的电动机。其可在开环控制模式下工作,每接收一个脉冲即可产生一个固定的位移增量,因此相较传统直流控制系统,整体成本更低。步进电机常见应用包括数控机床、打印机等设备。
在步进电机系统中,电机的运行平顺性、噪声水平以及异常工况下的可靠性,很大程度上取决于专用步进电机驱动芯片的电流调制、微步控制与诊断能力,这是体现步进性能好坏的核心器件。
围绕此类需求,纳芯微提供高集成式双相双极步进电机驱动器 NSD8381,该芯片支持最大1.35A满量程电流,包括电流斩波调节,内部最高1/32微步转换器和多种衰减模式选择使步进电机平稳运动,广泛适用于汽车前照灯步进控制(ADB/AFS)、HUD 位置调节电机、热管理系统阀门中的步进电机以及 BDC 电机驱动等应用。
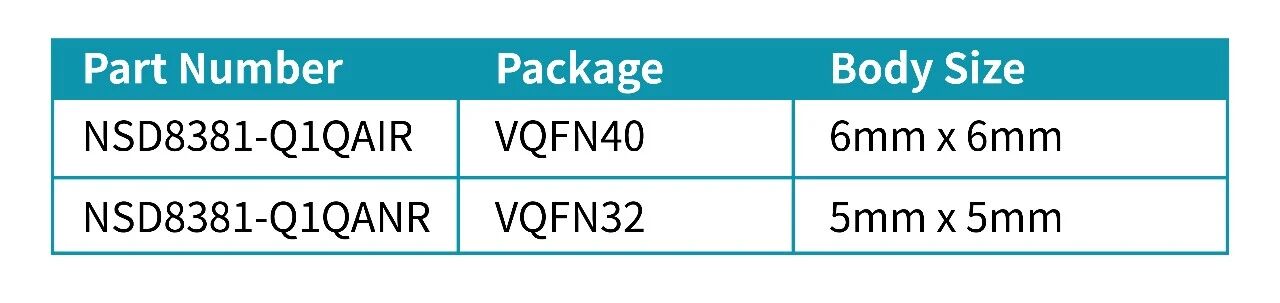
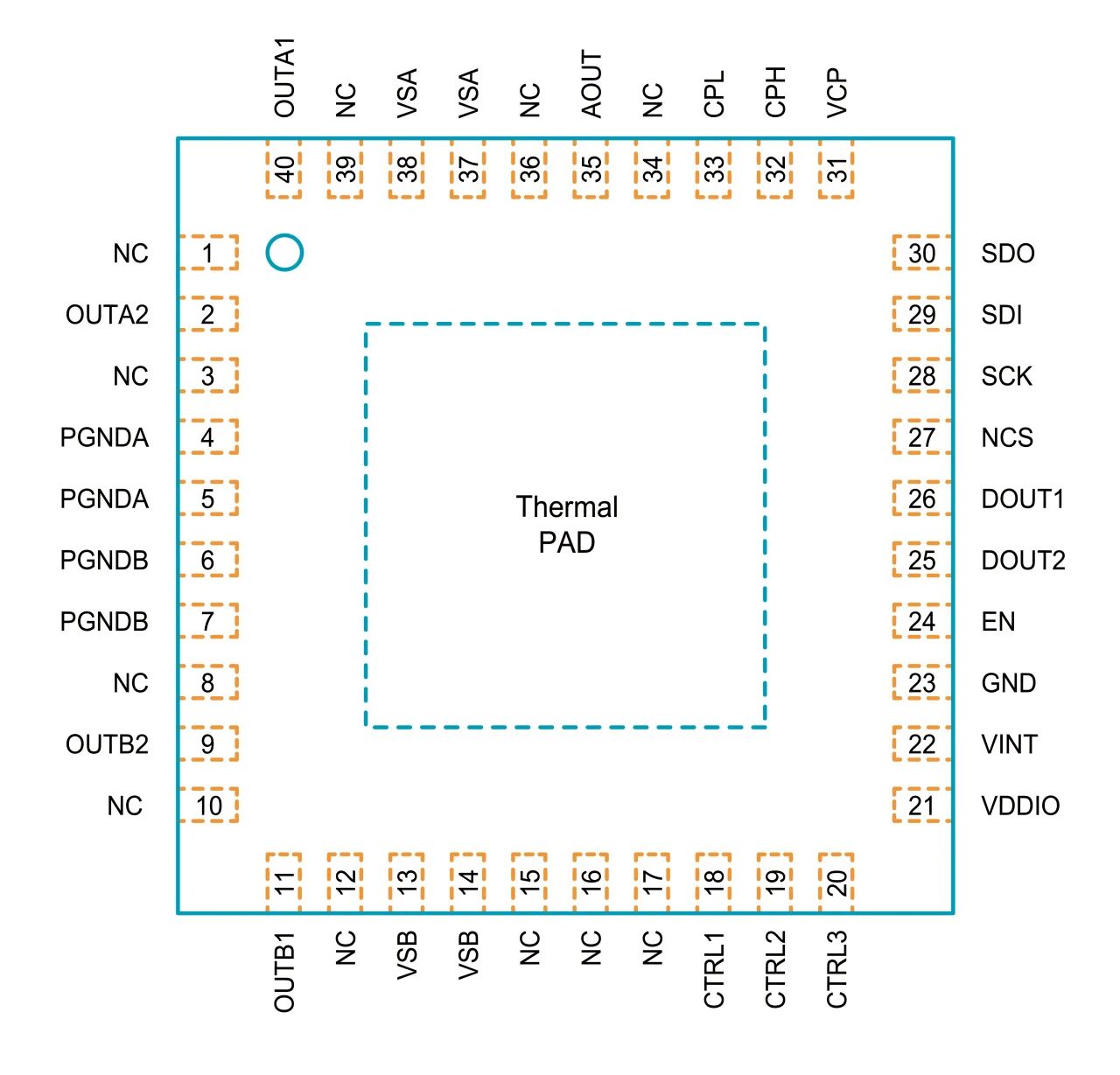
NSD8381选型表及VQFN40引脚图
变频器
以隔离驱动提升系统一致性与使用寿命
变频器广泛应用于工业电机驱动等场景,系统内部涉及多种控制接口与信号形式,对功率器件驱动的可靠性与一致性提出了较高要求。其中,功率器件的隔离驱动是变频器控制链路中的关键环节,直接影响系统的运行稳定性和长期可靠性。
围绕这一核心需求,纳芯微提供电流型隔离驱动器 NSI6801 系列,以及性能进一步提升、兼顾成本优势的 NSI6801Ex、NSI6801xC 系列,与传统光耦式栅极驱动器引脚兼容,可在变频器应用中实现对光耦驱动方案的直接替代。相较传统光耦方案,NSI6801 系列在可靠性、抗老化能力、工作温度范围、传播延迟及脉冲宽度失真等方面具备明显优势,有助于提升变频器系统的一致性与使用寿命。
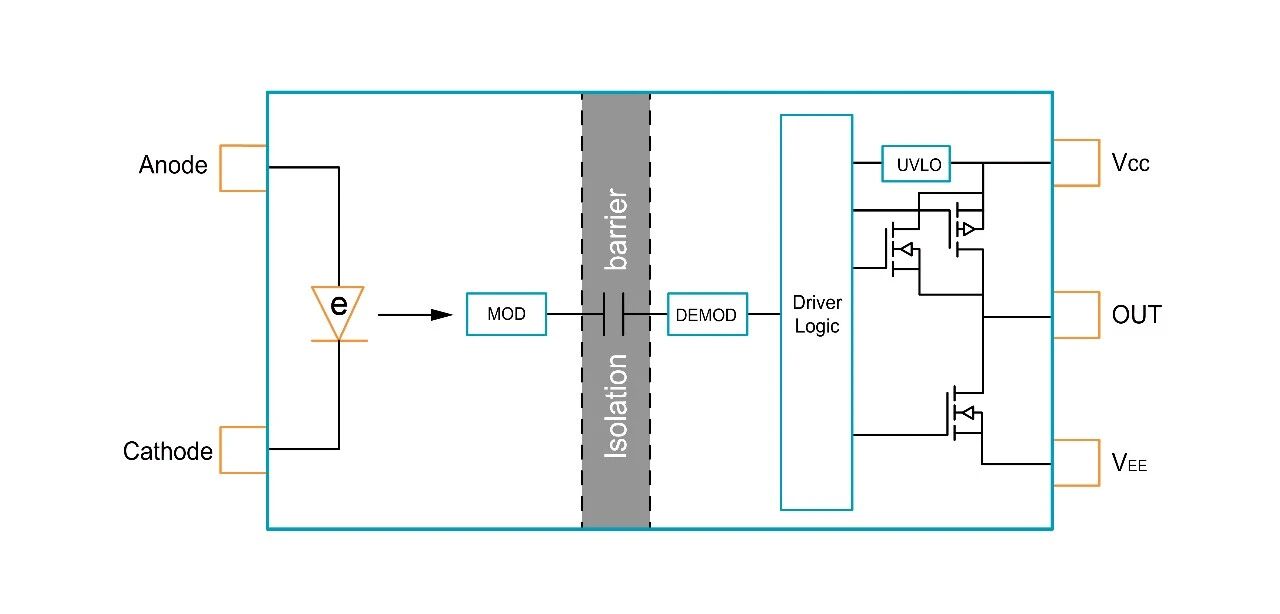
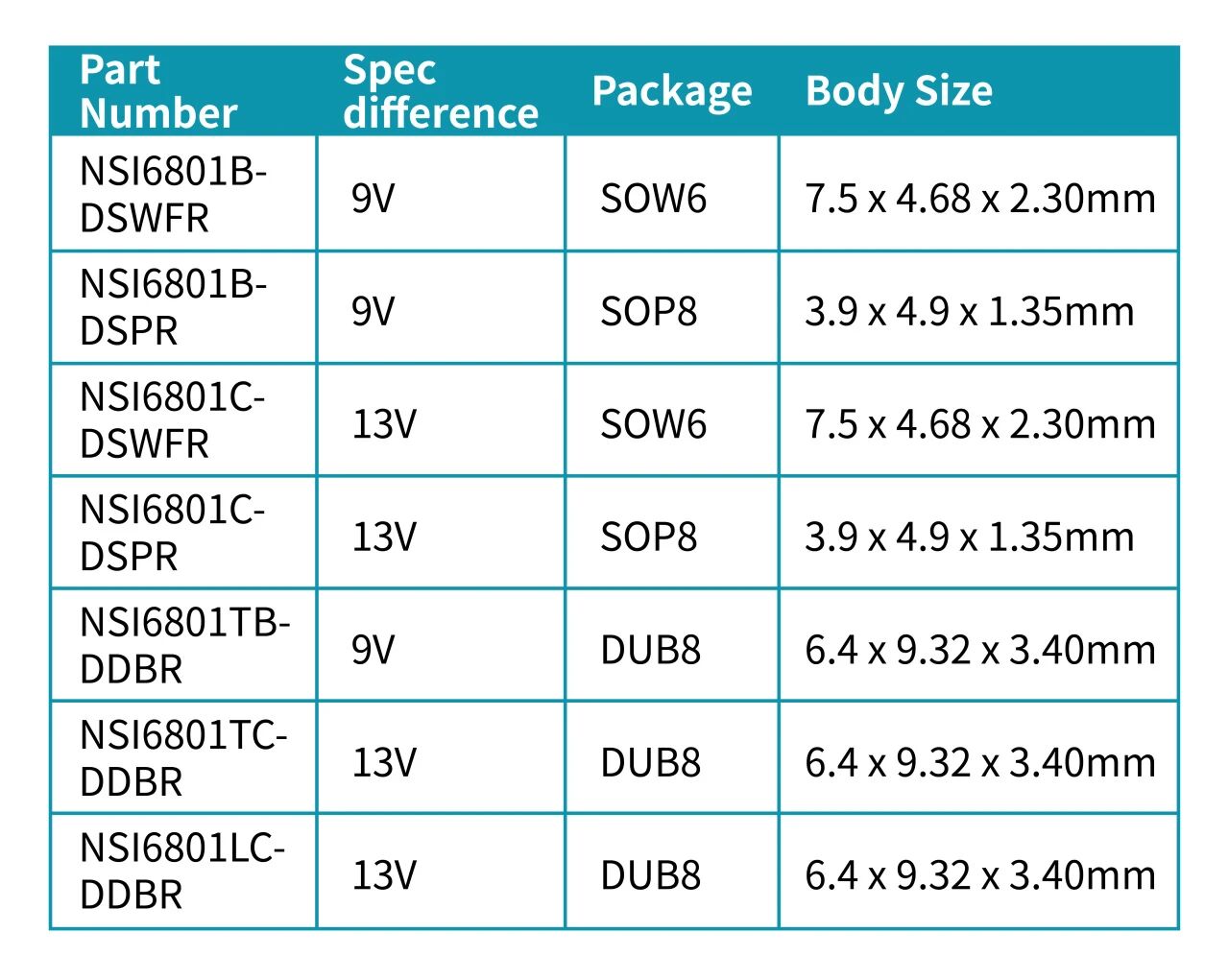
电流型隔离驱动NSI6801功能框图及选型表
此外,温度传感器 NST1002 可用于大功率器件或电路板的温度监测,支持变频器系统的热管理需求。
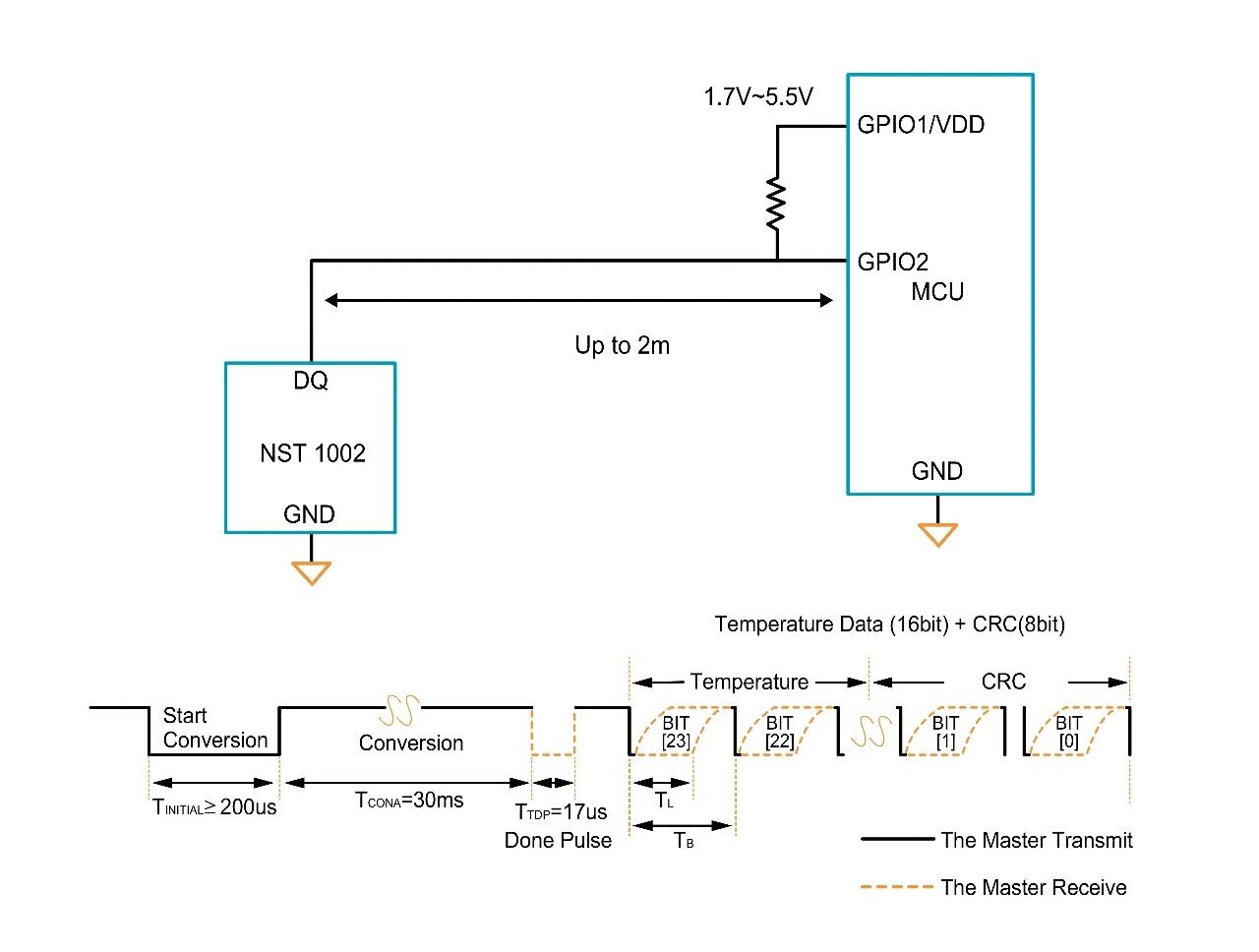
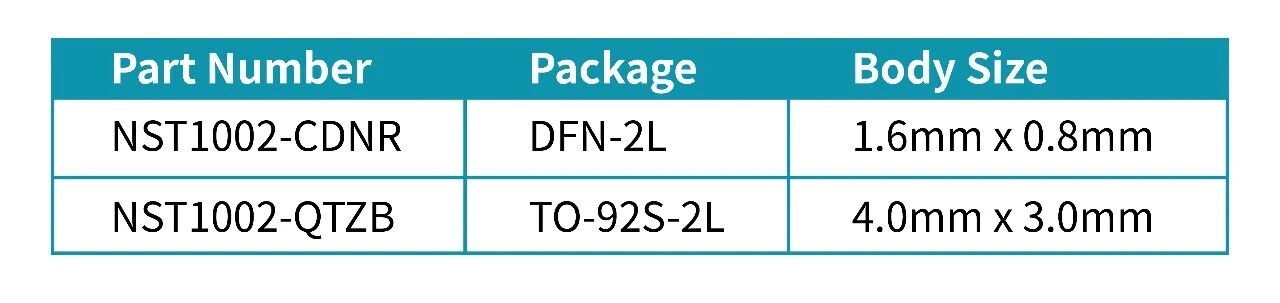
温度传感器NST1002功能框图及选型表
伺服系统
以编码器与高可靠驱动支撑高精度闭环控制
伺服电机采用闭环控制,对电机运行的精度要求较高,需依赖编码器提供实时的转速与位置信息。在此类应用中,编码器的精度、稳定性与环境适应性直接决定伺服系统的控制性能,磁编码器因可靠性高、抗环境干扰能力强,已成为伺服系统中的重要选择。在多轴控制场景中,一个主板往往需要同时连接多个伺服电机并实现协同工作。
传统磁编码器通常由 AMR 磁头、传感器以及性能较高的 M4 MCU 或分立多通道 ADC 构成,整体架构较为复杂,成本相对较高。纳芯微的 MT6835 本质上是一颗角度传感器,芯片内置 DSP,可直接完成角度计算并输出角度信息。纳芯微新一代高速高精度角度编码器芯片MT6826S,基于先进的各向异性磁阻(AMR)技术,提供客户端自校准模式,可以补偿由磁铁的不理想、结构安装的偏差所带来的各种非线性,大大提升INL特性。
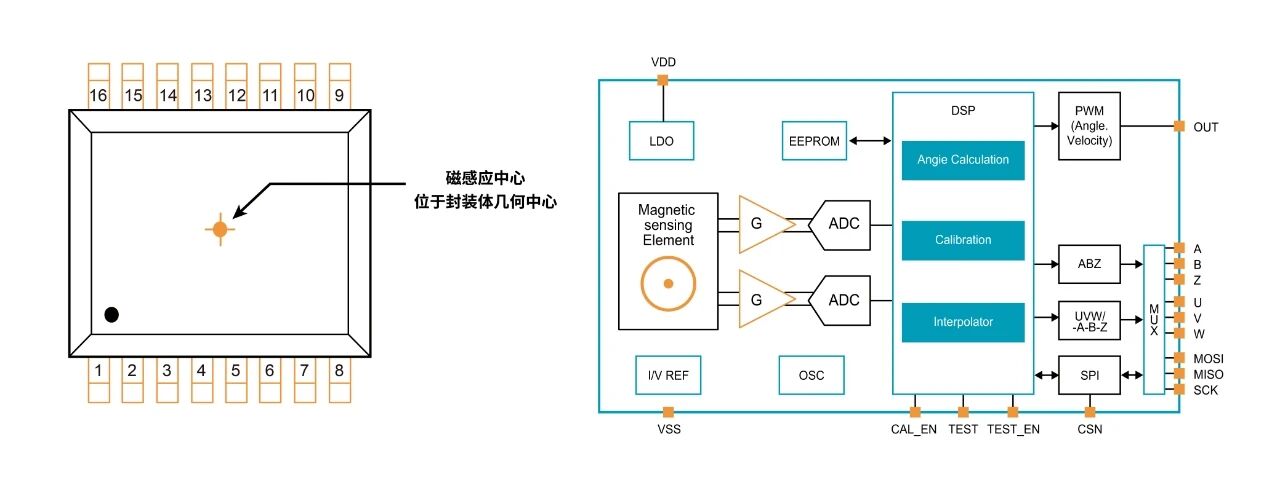
MT6835 TSSOP-16封装外观图和功能框图
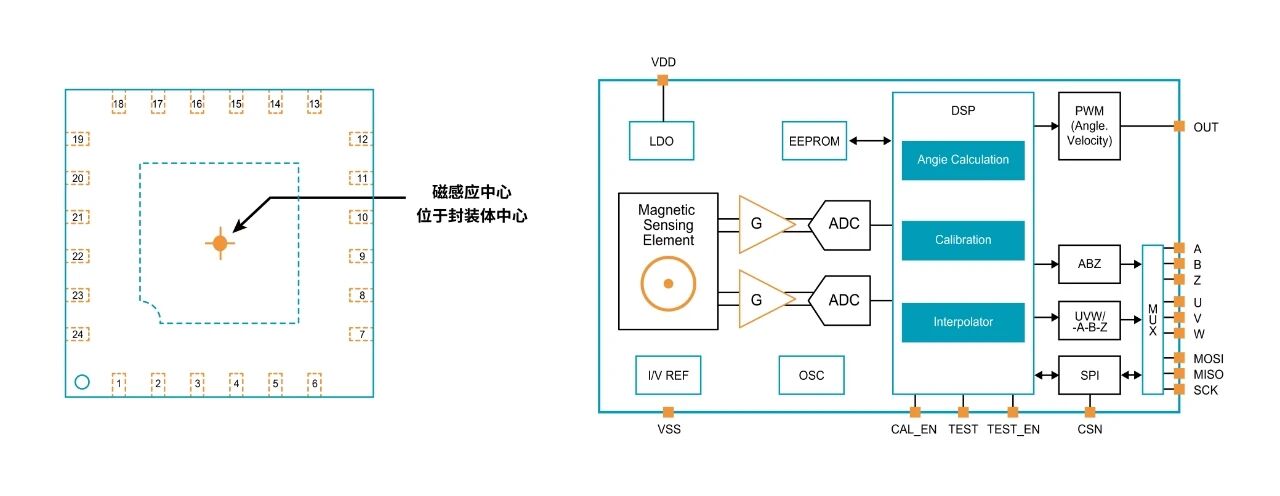
MT6826S QFN4x4-24L 封装外观图和功能框图
在变频及高端伺服应用中,功率器件长期运行于高电压、高电流工况下,驱动级的可靠性与保护能力是系统稳定运行的关键。围绕这一需求,纳芯微提供集成 DESAT 保护的低边驱动 NSD1015MT/T,以及与光耦驱动引脚兼容的智能隔离单管驱动器 NSI68515,覆盖隔离与非隔离两种实现方式,在降低系统成本和布板面积的同时提升整体可靠性。
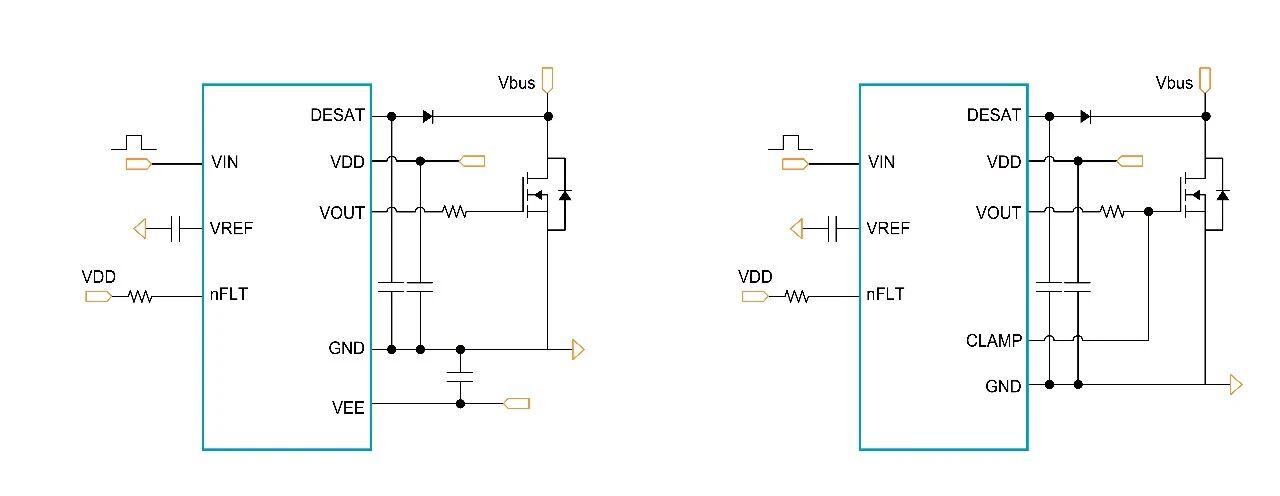 智能单通道非隔离栅极驱动器NSD1015T(左)
智能单通道非隔离栅极驱动器NSD1015T(左)
NSD1015MT(右)功能框图
面向人形机器人
高集成控制与位置感知方案
在人形机器人中,电机与减速器在整机成本构成及竞争力塑造中占据重要位置。关节与灵巧手等关键部位通常采用伺服电机,以满足对运动精度和动态响应的要求;而在头部、眼部等对精度要求相对较低、但对成本更敏感的部位,则可采用步进电机方案。
从系统层面看,人形机器人对控制精度、响应速度以及集成度提出了更高要求。无框电机在该类应用中较为常见,其控制方式本质上与无刷电机相似,差异主要体现在电机结构层面。在灵巧手等空间受限、集成度要求较高的场景中,通常采用 SoC 方案实现高度集成。例如,纳芯微 NSUC1610 将 MCU、反馈与驱动功能集成于单芯片中,可在紧凑空间内实现高效控制。
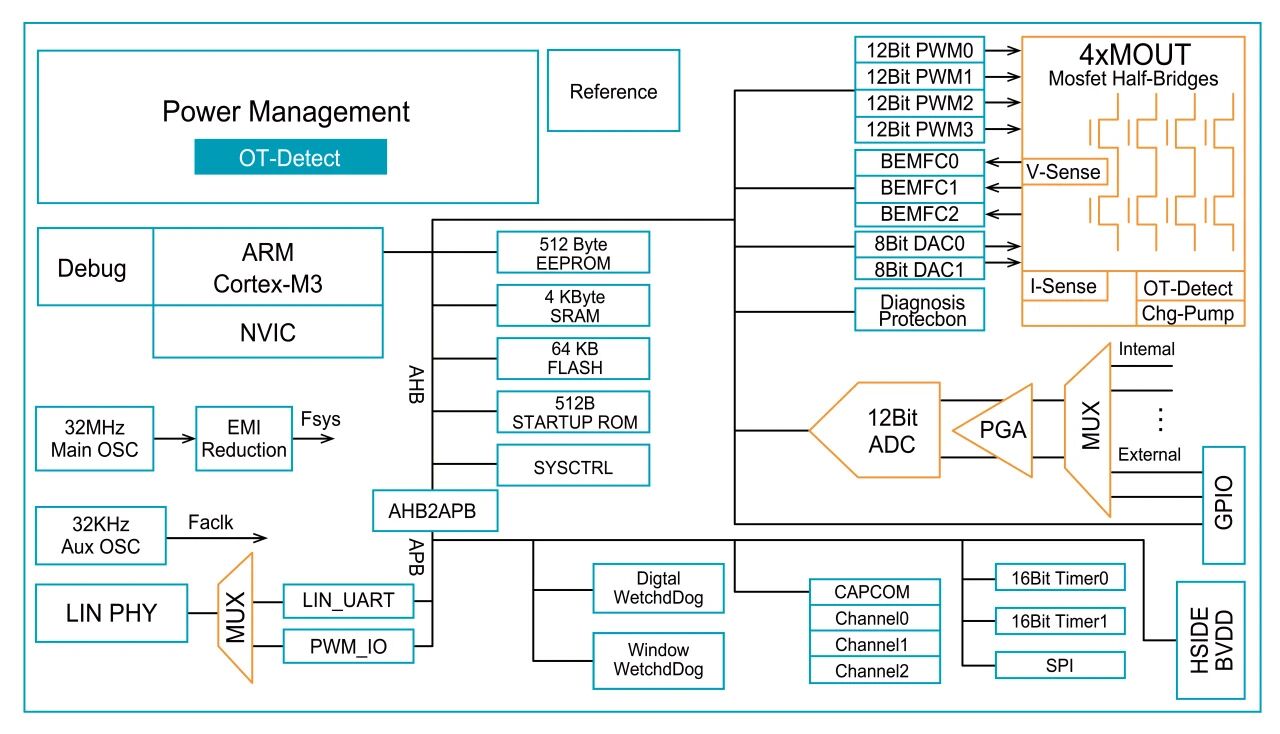
集成了4路半桥驱动器
专用处理器芯片NSUC1610功能框图
在电机轴位置检测方面,磁编码器因具备更强的抗振动和抗环境干扰能力,在工业与机器人应用中逐渐替代传统光电编码器。相较由磁头、传感器及高性能 MCU 或分立 ADC 构成的传统磁编码器方案,纳芯微 MT6835 通过集成角度解算与信号处理功能,显著简化系统架构。结合 NS300K214 及霍尔器件,可构成完整的磁编码器解决方案,在保证性能的同时有效降低系统成本,适用于对空间与成本敏感的人形机器人电机位置检测场景。