三维高斯溅射(3DGS)作为一种新兴的三维重建技术,被认为是下一代机器人即时定位建图(SLAM)任务的关键支撑技术。相比传统的SLAM方案,3DGS-SLAM能够实现视觉还原的稠密建图和精确鲁棒的位姿追踪,并支持多模态与大场景扩展。然而,现有的3DGS-SLAM系统在处理高斯椭球和像素间非规则稀疏性、以及反向传播梯度聚合时存在性能瓶颈,难以满足机器人实时位姿追踪的需求。
面向上述需求与挑战,复旦大学集成芯片与系统全国重点实验室陈迟晓课题组设计了一款软硬件协同优化的3DGS-SLAM加速器——GauSPU。该工作的主要亮点包括:
1.提出了像素块稀疏采样的位姿训练策略,集中学习帧内高误差区域,在保持追踪精度的同时减少工作载荷。
2.设计了光线递归单元,通过细粒度的像素块处理、以及空间聚合的像素分配,优化了对体渲染过程中稀疏性的利用。
3.设计了高斯缓存单元以及位姿反传管线,将像素块内的高斯梯度合并,将不同像素块的梯度异步反向传播,避免了原子操作导致的访存瓶颈。
经仿真评估,GauSPU在室内场景Replica数据集上运行3DGS-SLAM任务,针对前向体渲染过程可以实现16倍加速比,针对整个位姿反向传播过程可以实现50倍加速比。GauSPU使得3DGS-SLAM的位姿追踪性能首次达到了实时水平(33FPS @ 10iter),为该技术的应用落地提供了助力。
相关论文成果以“GauSPU: 3D Gaussian Splatting Processor for Real-Time SLAM System”为题,入选计算机体系结构领域顶会57th IEEE/ACM International Symposium on Microarchitecture(MICRO 2024)。该会议于11月2日至6日在美国德州奥斯汀召开,论文第一作者吴立舟博士生在会上作口头报告。复旦大学集成芯片与系统全国重点实验室为上述论文的第一完成单位,朱浩哲博士后为通讯作者。
该项工作在全国重“集成芯片创新中心”和“IP与芯片架构创新中心”交叉合作下共同完成,也是全国重首次在计算机体系结构领域实现突破,首次在体系结构的顶会上发表论文。研究得到了国家自然科学基金(62304047)和教育部新一代集成电路技术集成攻关大平台领军人才项目的资助。
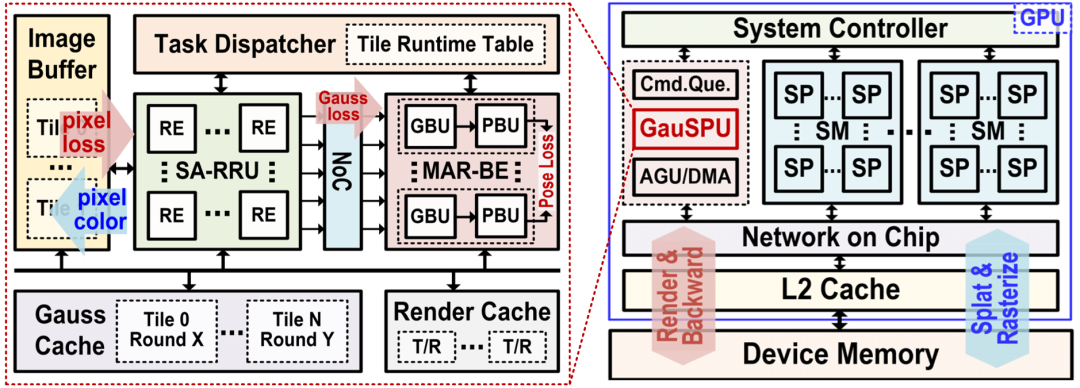
GauSPU加速器的整体架构以及GPU扩展方案

参会照片
2022年,在原专用集成电路与系统国家重点实验室的基础上,经科技部批准依托复旦大学重组建设集成芯片与系统全国重点实验室,成为20家重组“标杆”实验室之一,由刘明院士任实验室主任。实验室设立了主攻任务“集成芯片与系统应用”及其相关支撑任务,并把握综合性大学优势组织集成电路、信息、计算机、物理、材料等领域学者,设立组建了集成芯片、EDA、IP/架构、超高速电路与系统和未来芯片等5个创新中心。