1.亚马逊被控侵犯数据存储专利,赔款额达5.25亿美元
2.紫光同创“可编程逻辑器件的延时估算方法、装置、设备及存储介质”专利获授权
3.华为公布一项SiC晶体相关专利
4.中芯国际“图像传感器结构以及获得高光溢出的方法”专利公布
5.百度网讯申请一项毫米波雷达相关专利
1.亚马逊被控侵犯数据存储专利,赔款额达5.25亿美元

集微网消息,美国伊利诺伊州陪审团4月10日表示,亚马逊旗下的亚马逊网络服务公司(AWS)因侵犯科技公司Kove在数据存储方面的专利权,需赔偿5.25亿美元。
陪审团裁定,亚马逊AWS侵犯了Kove公司的三项专利,该公司称这些技术对亚马逊云计算部门“存储和检索海量数据”的能力至关重要。
亚马逊发言人表示,该公司不同意这一判决,并打算上诉。
Kove首席律师Courtland Reichman称,这一判决“证明了创新的力量,以及初创公司面对科技巨头,保护知识产权(IP)的重要性。”
据悉,总部位于芝加哥的Kove公司于2018年起诉亚马逊,该公司在诉讼中表示,它开创了实现高性能云存储的技术,比这一应用的出现还要早好几年。
Kove指控亚马逊的S3存储服务、Dynamo DB数据库服务和其它产品侵犯了其云存储专利,陪审团4月10日同意Kove的观点,认为亚马逊AWS侵犯了3项相关专利,但驳回了亚马逊故意侵权的说法。
2023年,Kove还在另一起诉讼中起诉谷歌公司,称其同样侵犯了专利,该诉讼仍在进行中。
2.紫光同创“可编程逻辑器件的延时估算方法、装置、设备及存储介质”专利获授权
集微网消息,天眼查显示,深圳市紫光同创电子有限公司近日取得一项名为“可编程逻辑器件的延时估算方法、装置、设备及存储介质”的专利,授权公告号为CN114169283B,授权公告日为2024年4月5日,申请日为2021年10月27日。
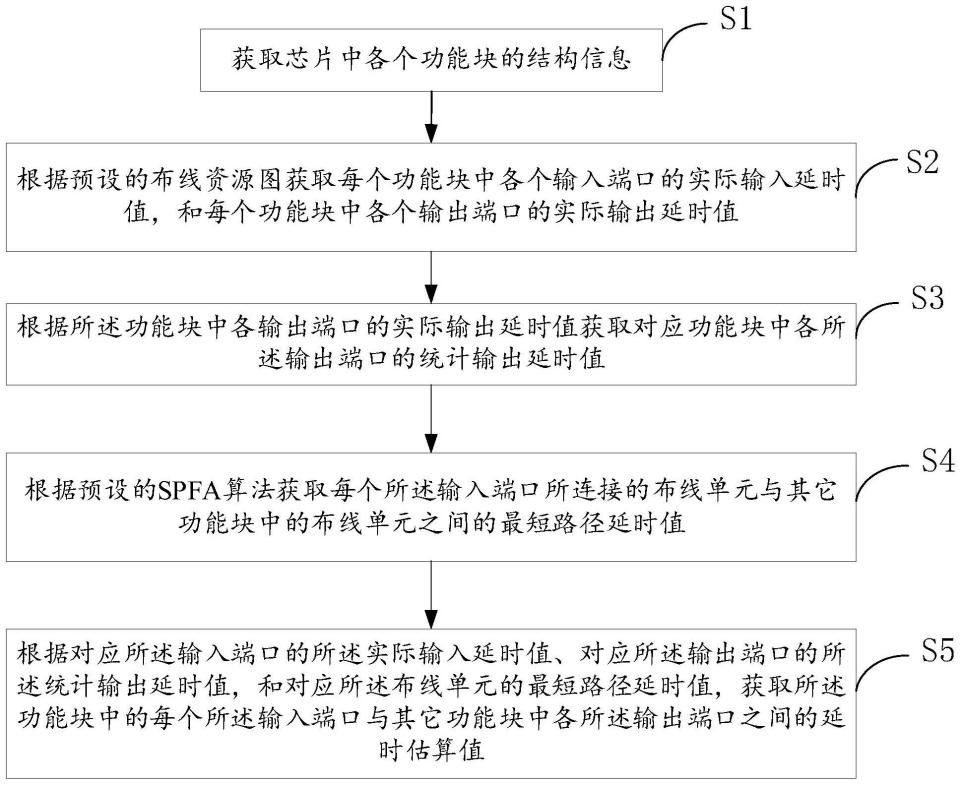
本发明公开了一种可编程逻辑器件的延时估算方法、装置、设备及存储介质,属于集成电路设计领域。它包括:获取芯片中各个功能块的结构信息;获取每个功能块中各个输入端口的实际输入延时值,和每个功能块中各个输出端口的实际输出延时值;根据所述功能块中各输出端口的实际输出延时值获取对应功能块中各所述输出端口的统计输出延时值;获取每个所述输入端口所连接的布线单元与其它功能块中的布线单元之间的最短路径延时值;获取所述功能块中的每个所述输入端口与其它功能块中各所述输出端口之间的延时估算值。本发明可以兼顾可编程逻辑器件的内存开销,适用于超大规模的可编程逻辑器件的延时估算。
3.华为公布一项SiC晶体相关专利
集微网消息,4月5日,华为技术有限公司公开一项“挡板、芯片、SiC晶体、晶体生长炉和生长方法”专利,申请公布号为CN117822097A,申请日期为2022年9月28日。
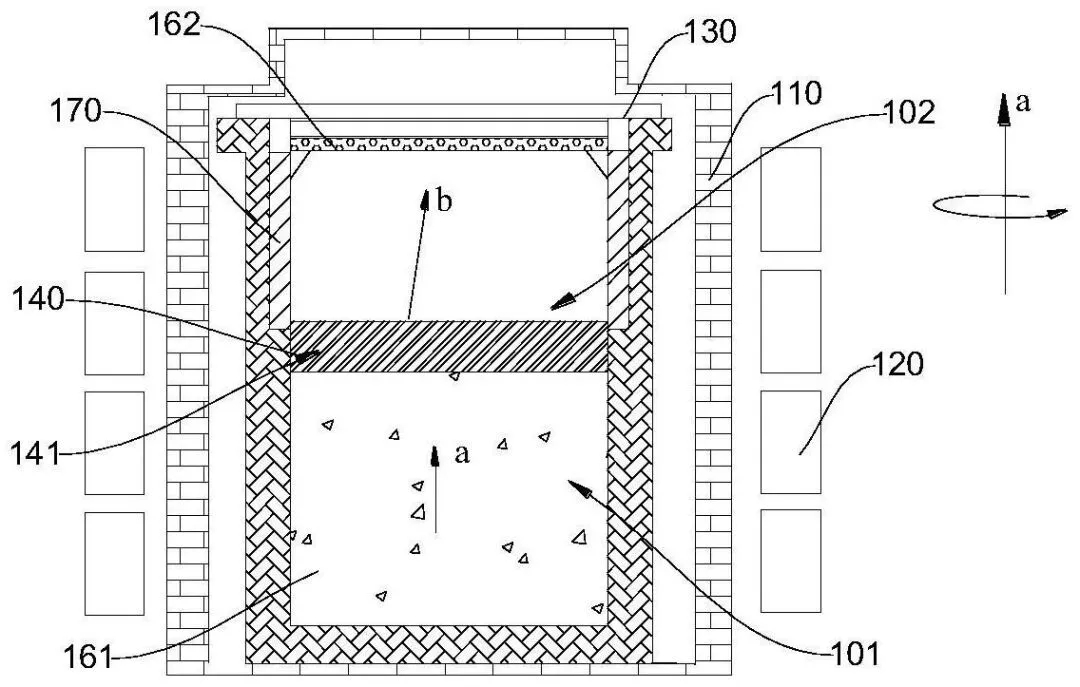
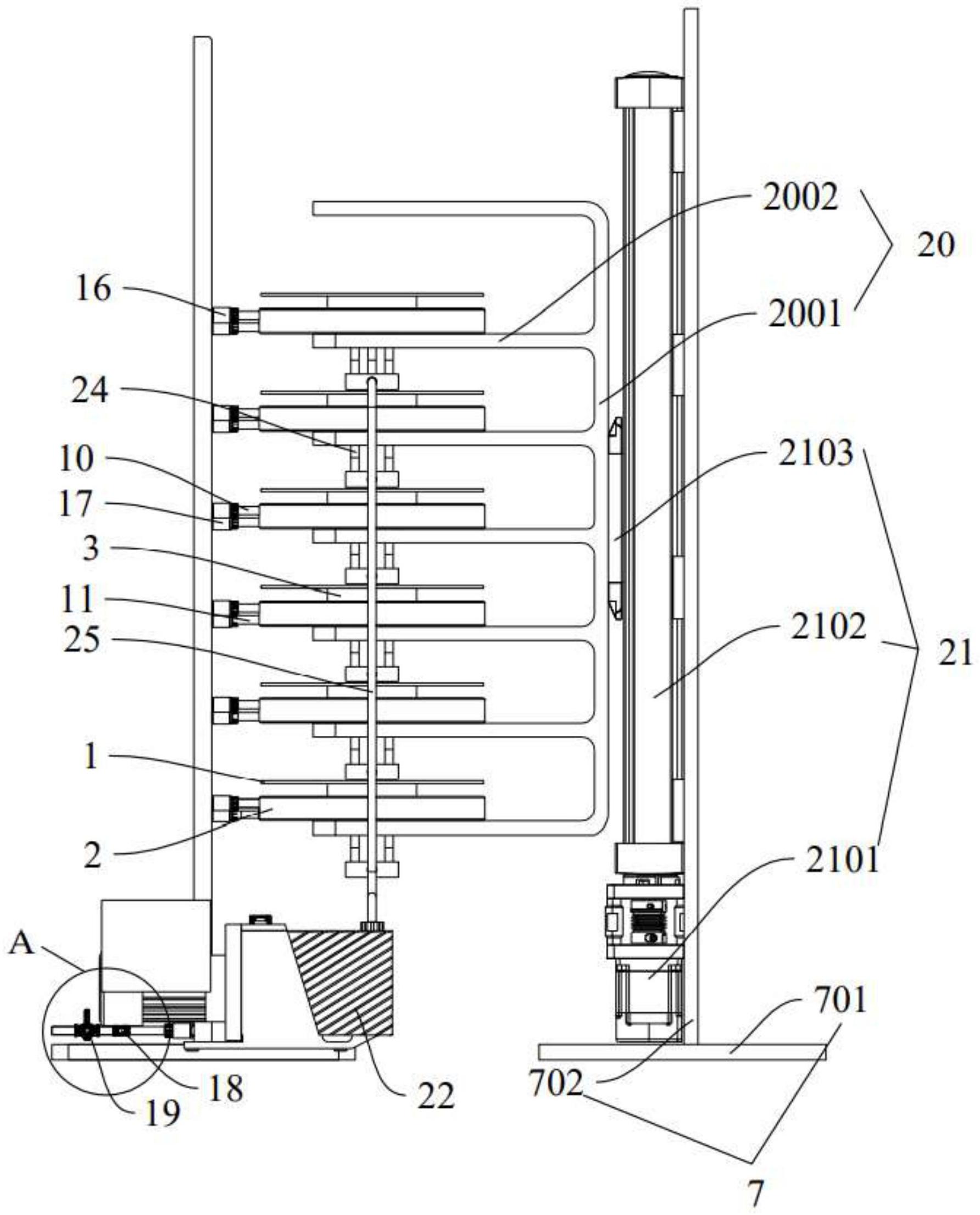
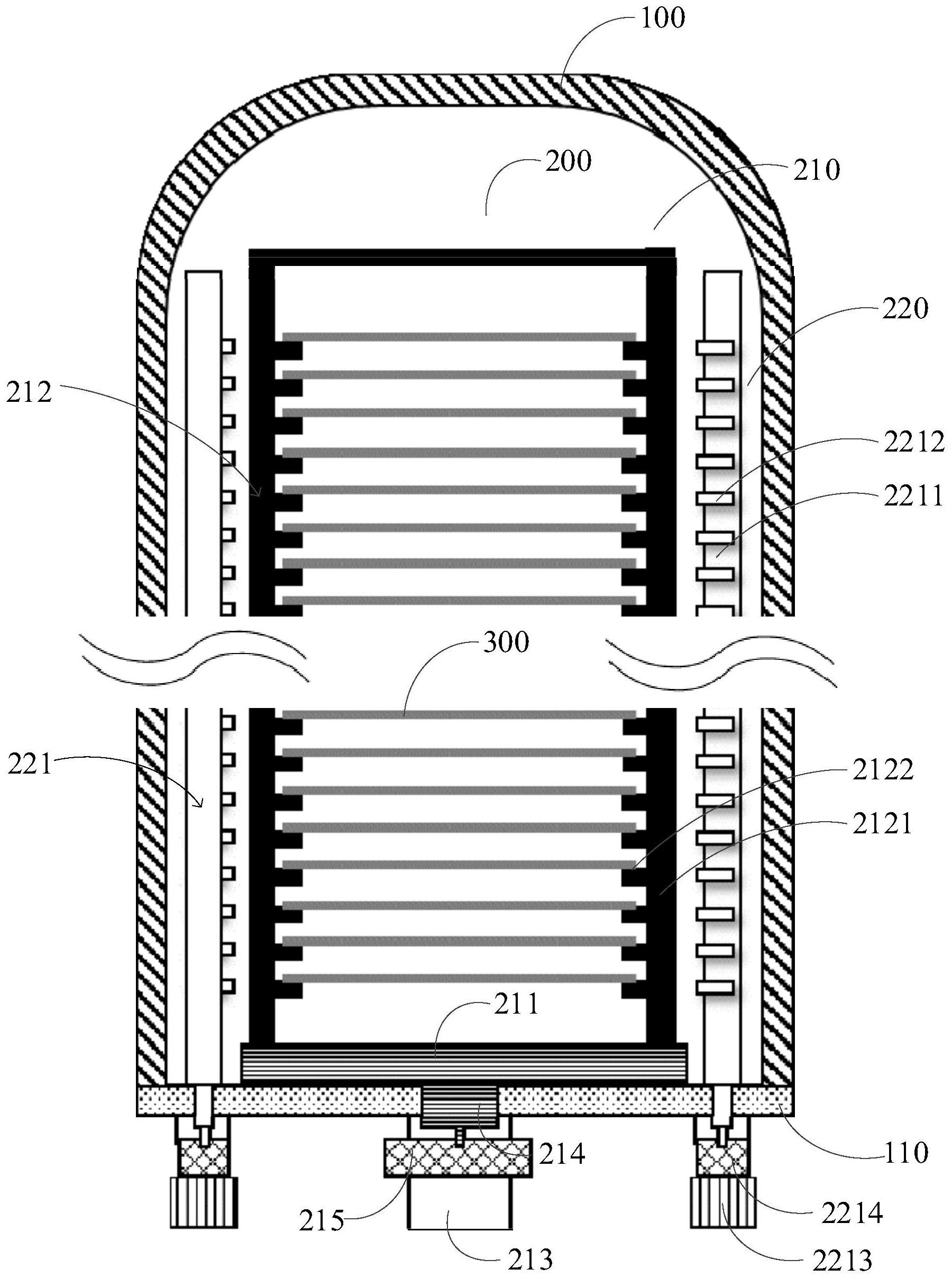
该专利摘要显示,本申请实施例公开了一种挡板、芯片、SiC晶体、晶体生长炉和生长方法,涉及碳化硅晶体技术领域,有效改善晶体质量。具体方案为:于晶体生长炉内设置挡板,该挡板的通道可改变炉体内气相源的运动方向,将气相源的运动方向改变为斜向上,使气相源朝向籽晶的小面运动。本申请实施例可提高晶体的生长速度,提高晶体的厚度和质量,降低微管密度。另外,选用低密度石墨作为挡板的材料,当通道被封堵后,低密度石墨内的孔隙可以供气体通过,能进一步降低晶体内包裹物的含量,提高晶体质量。
4.中芯国际“图像传感器结构以及获得高光溢出的方法”专利公布
集微网消息,天眼查显示,中芯国际集成电路制造(上海)有限公司“图像传感器结构以及获得高光溢出的方法”专利公布,申请公布日为2024年4月5日,申请公布号为CN117832231A。
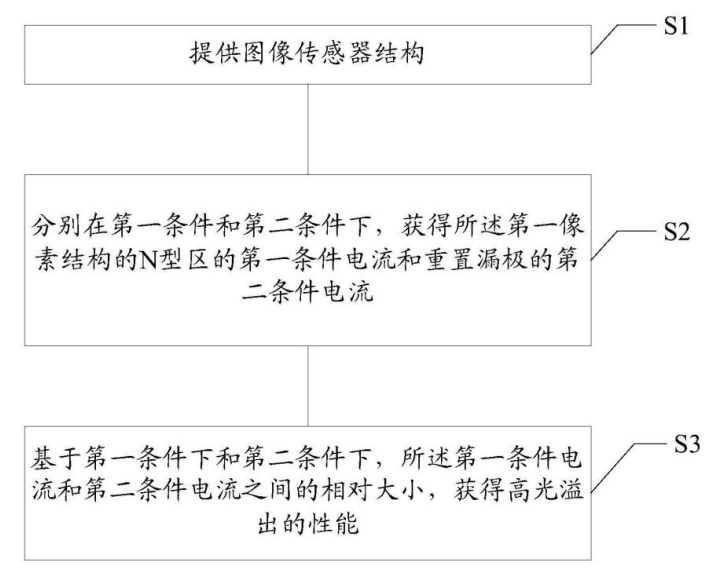
一种图像传感器结构以及获得高光溢出的方法,方法包括:提供图像传感器结构,图像传感器结构包括像素单元,每个像素单元包括多个相邻的像素结构;其中,像素单元中多个像素结构共用传输漏极,像素单元包括相邻的第一像素结构和第二像素结构;分别在第一条件和第二条件下,获得第一像素结构的N型区的第一条件电流和重置漏极的第二条件电流;基于第一条件下和第二条件下,第一条件电流和第二条件电流之间的相对大小,获得高光溢出的性能。本发明实施例提高对高光溢出性能评估的全面性和准确性。
5.百度网讯申请一项毫米波雷达相关专利
集微网消息,天眼查显示,北京百度网讯科技有限公司“基于毫米波雷达的目标速度预测方法、装置及存储介质”专利公布,申请公布日为2024年4月5日,申请公布号为CN117830642A。
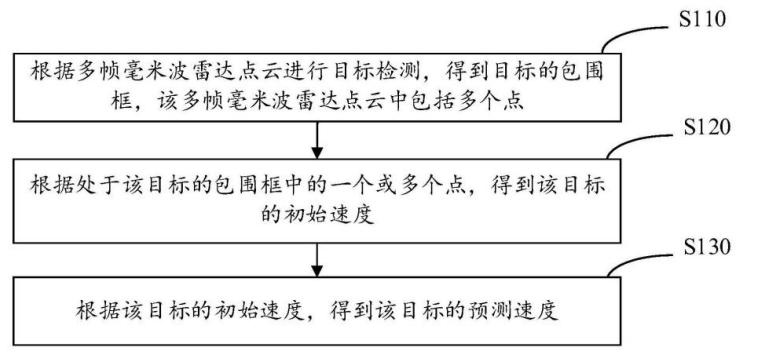
本公开提供了一种基于毫米波雷达的目标速度预测方法、装置及存储介质,涉及计算机技术领域,尤其涉及图像识别、目标检测、自动驾驶等领域。具体实现方案为:根据多帧毫米波雷达点云进行目标检测,得到目标的包围框,该多帧毫米波雷达点云中包括多个点;根据处于该目标的包围框中的一个或多个点,得到该目标的初始速度;根据该目标的初始速度,得到该目标的预测速度。本公开实施例中,基于多帧毫米波雷达点云能够提高毫米波雷达点云稠密性,得到的目标的包围框更加准确,能够得到更加准确的初始速度,从而提高预测速度的准确性。