

【嘉勤点评】优艾智合的路径规划专利,通过对若干地图进行处理,以得到所对应的有向加权地图,实现了跨地图的路径规划,加快了路径规划的速度,提高了路径搜索的速度。
集微网消息,优艾智合应用高精度激光SLAM导航复合移动操作机器人,搭载YOUI Pilot导航系统、YOUI Fleet机器人调度系统,及YOUI TMS场内物流管理系统,实现稳定连续、高效的晶圆生产。
随着人工智能技术的发展和不断完善,智能机器人越来越广泛的被应用在人们的生活和工作中。而在控制机器人完成相关的工作时,需要进行合理的控制和规划,一个合理的路径规划可以更加快速准确的完成对任务的执行。但是在现有的路径规划中,通常是在一个地图或者一个地图层级上完成,当出现需要进行跨地图的运输时,不能及时准确的完成对机器人的路径规划,使得效率较低。
为此,优艾智合于2021年3月12日申请了一项名为“路径规划方法、路径规划装置、管理系统和存储介质”的发明专利(申请号: 202110271767.8),申请人为深圳优艾智合机器人科技有限公司。
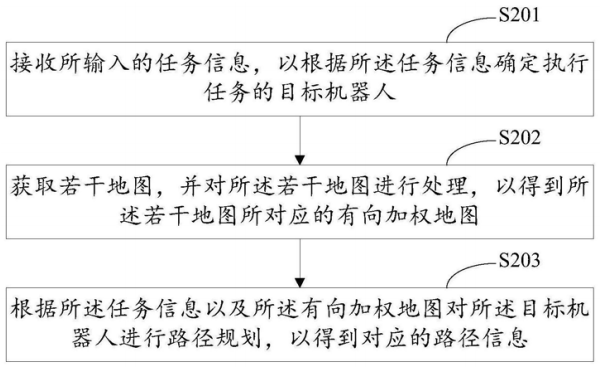
图1 路径规划方法流程示意图
图1为本发明提出的路径规划方法的流程示意图,主要包括以下步骤:首先接收所输入的任务信息,以根据所述任务信息确定执行任务的目标机器人(S201)。用户在需要调用机器人执行相关的任务时,会在相关的系统上进行相应的操作,以使得机器人完成用户想要完成的任务和事情。因此,在需要实现对机器人的调用时,将会接收用户通过相关的操作而输入的任务信息,以确定用户想要执行的任务,进而根据所需要执行的任务确定当前选择哪一或者哪些机器人作为执行任务的目标机器人。
然后获取若干地图,并对所述地图进行处理,以得到所述若干地图所对应的有向加权地图(S202)。在完成对目标机器人的路径规划时,在确定目标机器人的同时,还需要根据任务信息确定当前所需要使用的地图,进而实现对目标机器人的路径规划。因此,此时还将获取若干地图,然后对其进行处理,以得到对应可以快速实现路径规划的有向加权地图,进而在所得到的有向加权地图上完成对目标机器人的路径规划。
最后根据所述任务信息以及所述有向加权地图对所述目标机器人进行路径规划,以得到对应的路径信息(S203)。在完成目标机器人的确定以及有向加权地图的生成之后,将根据实际的任务信息以及所得到的有向加权地图实现对目标机器人的路径规划,进而将所规划好的路径信息发送给目标机器人,以使目标机器人按照所接收到的路径信息运行。
简而言之,优艾智合的路径规划专利,通过对若干地图进行处理,以得到所对应的有向加权地图,实现了跨地图的路径规划,加快了路径规划的速度,提高了路径搜索的速度。
优艾智合积极践行企业使命—“机器人技术赋能场景变革”,坚持技术创新,场景革新,力争成为机器人行业领军企业。优艾智合面向芯片生产打造的工业物流解决方案,应用于晶圆制造、芯片封测等全产业链环节,帮助众多厂商完成自动化升级,实现了效率效益双提升的目标。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


