
2026年4月19日,第二届北京亦庄人形机器人半程马拉松赛事圆满落幕。多台搭载进迭时空 RISC-V AI CPU K3 芯片的「灵龙 2.0」人形机器人顺利完赛。「灵龙 2.0」是上海国家地方共建人形机器人创新中心开发的人形机器人平台。在长距离、高负载、强实时的极限场景中,K3 经受住了实战验证。面对人形机器人运动控制对芯片“算力、响应、功耗、通信”高度耦合的系统级严苛要求:既要保障AI推理的高吞吐算力,又要满足伺服控制的瞬间响应,还需在长续航下守住功耗红线、在多传感器并行时压缩传输延迟。K3 从芯片微架构层面给出了一体化解答,标志着 RISC-V 芯片方案已具备支撑高动态、复杂环境人形机器人竞技的成熟工程能力。


架构优势:为人形机器人而生的芯片微架构
传统“CPU+MCU+NPU”多芯片分立架构,各功能域依赖外部总线桥接,跨芯片通信延迟存在高度不确定性。在 500Hz+ 高频伺服场景下,这种微秒级抖动成为难以逾越的系统性瓶颈。K3 则从芯片微架构层面给出了一体化解答:
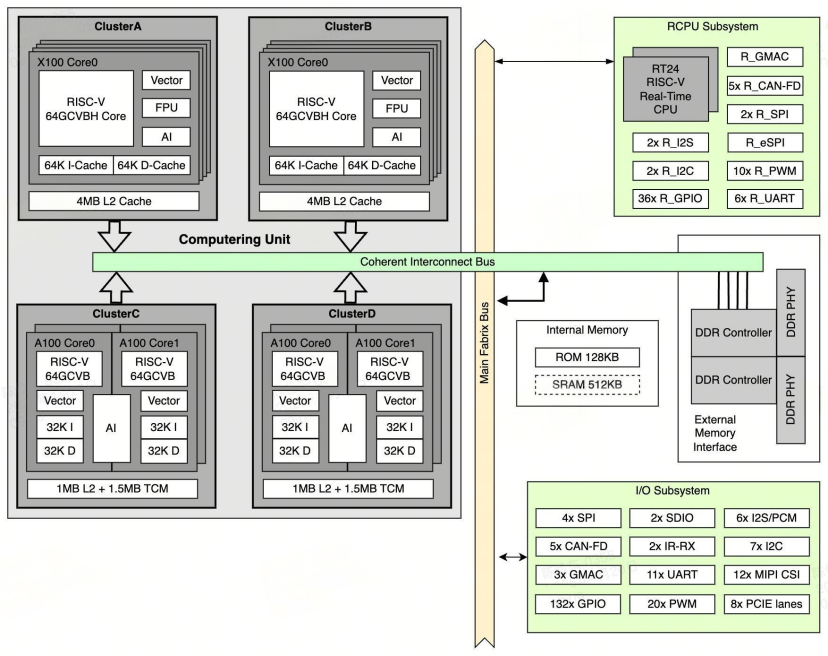
K3 芯片一体化架构示意图
3MB TCM,打破推理“内存墙”。RL 策略权重完整驻留片上,消除 DDR 访问延迟长尾,实测推理延迟降低约 60%,P99 与 P50 几乎持平;
1024 位超宽向量引擎,弥合 Sim2Real 时序鸿沟单指令并行处理 128 个 INT8 数据,保障多模态+数据时间戳严格对齐;
双域共享中断与双套控制寄存器共存,实现实时域与算力域的并行自治。实时域以微秒级延迟完成电机指令下发,算力域同步刷新推理流水线,两域按各自时钟独立调度,互不拖累,500Hz 通信周期抖动稳定在个位数微秒量级;
统一内存架构,实现三域共享内存与域间互相保活。通用域、算力域、实时域共享同一物理内存,零拷贝数据流转,端到端延迟趋近于单次内存访问。
架构共振:K3+OpenLoong软硬深度融合
K3 芯片架构与 OpenLoong 控制框架之间,不是简单的”兼容”关系,而是硬件拓扑与软件分层在设计上的精准对齐——框架的每一层抽象都能直接映射到芯片的对应硬件域,无需适配层、无需中间件桥接、无需性能妥协。
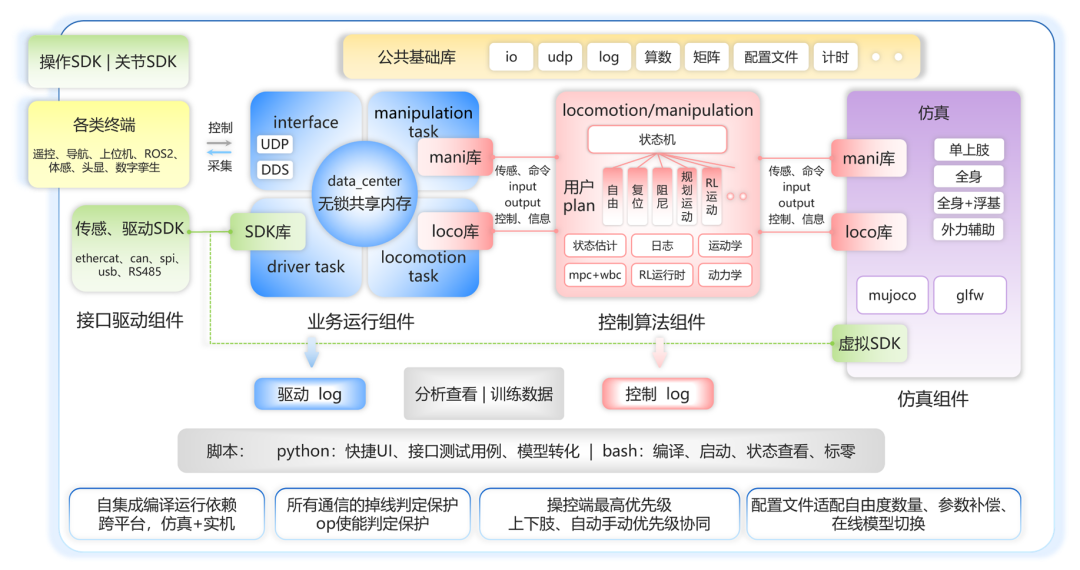
灵龙机器人 OpenLoong 控制框架示意图(业务层、推理层、驱动层三层解耦架构)
这种架构共振体现在三个关键维度:
维度一:OpenLoong 框架无锁共享内存 ↔ 多核拓扑,零拷贝数据共享
维度二:CAN FD 中断直连大核 ↔ 驱动层硬实时需求——路径最短、确定性最高,中断延迟控制在个位数微秒
维度三:三域 UMA ↔ data_center 零拷贝数据流,K3 的三域统一内存架构为软件设计意图兑现
OpenLoong 的业务层 → X100 通用域,推理层 → A100 算力域,驱动层 → RCPU 实时域;data_center 无锁队列 → UMA 共享内存。三层对三域,层层精准映射——这就是”架构共振”的本质,不是事后适配,而是设计哲学上的同频共振。
生态践行:高效落地,快速验证
从 x86_64 训练环境向 RISC-V 端侧迁移,通常面临 C/C++ 运行时依赖及内核驱动 ABI 差异等交叉编译风险。K3 的应对策略是从底层消除这些障碍:
Upstream 主线合入:K3 核心模块已合入 Linux v7.0-rc1 内核主线,是全球首款填补 RISC-V RVA23 Profile 规范内核空白的量产芯片,ABI 兼容性与驱动稳定性从源头得到保障
Bianbu OS 预置完整机器人软件栈:基于 Ubuntu 26.04 LTS 构建,原生集成 ROS 2 Jazzy、Nav2、MoveIt 2 等核心中间件,预置经硬件适配验证的 HAL 包;
工具链闭环:GCC 14 RISC-V 交叉编译工具链、GDB 远程调试、perf/ftrace 性能剖析及 SpacemiT AI 模型 Profiler,覆盖从编译、调试到性能调优的全流程。
主线内核与成熟工具链,将迁移成本压缩至最低。基于这套生态,国地中心团队仅用半小时完成环境配置,OpenLoong 框架及全部依赖一次性通过原生编译,无需源码级适配。Sim2Real 环境搭建从通常的数周压缩至半天。
半程马拉松对端侧运控构成极限压测:长时热稳定性、数十万次伺服周期的 P99.9 延迟、多域协同鲁棒性、真实路面策略泛化——K3 全程表现稳定,从首次联调到完赛验证,总计仅用 3 个月。
K3 的未来展望:从运控小脑到具身大脑
本次半马实战不仅验证了 K3 在端侧低延迟运控场景下的极致工程可靠性,同时为上层决策能力的持续落地预留了充沛的算力冗余与丰富的标准化系统接口。
未来,进迭时空将与国地中心持续深化协作,推进端侧视觉-语言联合理解与多智能体协同能力的部署。随着 K 系列芯片在能效比、AI 算力密度与多域协同能力上的持续迭代,基于 RISC-V 架构的开放、高效、可扩展的具身智能算力底座,正从愿景走向现实。
21.0975公里,是人形机器人的里程碑,也是 RISC-V 的新起点。








