

【嘉勤点评】哪吒汽车发明的搭载透明A柱的车辆盲区探测方案,借助检测算法以及AR技术,能够完整呈现A柱盲区图像,从而避免了盲区的残留。不仅提高了行车安全,同时也能够提高驾驶者的视觉体验。
集微网消息,近日,哪吒汽车宣布已与商汤科技开启全面战略合作,主要围绕智能驾驶和智能座舱领域,共同建立长期的战略合作伙伴关系,携手构建为人民造智能汽车的生态新格局。
智能座舱领域的一项重要任务,就是保证驾驶员和车辆行驶过程中的安全。其中之一就是车辆A柱的盲区,该盲区会给驾驶员在驾驶过程中带来较大的安全隐患。
现有的解决方案一般在车辆两侧外设置摄像头,照射A柱盲区的位置,并将获取的图像信息在车内显示。但是目前的大多数车辆一般只设置一个照射A柱盲区的摄像头,并且照射方向相对固定,使得其无法完整有效地呈现A柱盲区的图像,不仅视觉体验较差,同时仍然会存在一定的盲区,不能够完全排除安全风险。
为此,哪吒汽车在2019年8月16日发明了一项名为“一种透明A柱的多摄像头实现方法及系统”的发明专利(申请号:201910757501.7),申请人为浙江合众新能源汽车有限公司。
根据该专利目前公开的相关技术资料,让我们一起来看看这项透明A柱的实现方案吧。
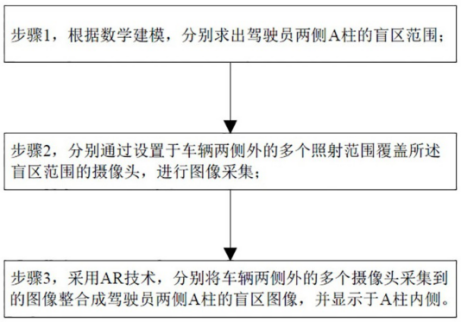
如上图,为该专利中发明的搭载有透明A柱的多摄像头实现方法,其首先需要根据数学模型,求出驾驶员两侧A柱的盲区范围,由于不同的车型具有不同的结构分布,因此该模型需要具备一定的鲁棒性,以适应多种车型。
此外,由于A柱的位置在车内是固定,而驾驶员的眼睛位置会随着驾驶员的高度,座椅的前后高低等因素改变,所以需要确定驾驶员实际的眼睛位置,才能通过数学模型准确地计算出A柱盲区范围。
该专利中提及,为了确定驾驶员的眼镜位置,需要在车内建立坐标系,从而确定驾驶座前侧摄像头的具体坐标,然后通过图像识别算法,计算得到驾驶员眼镜和摄像头在车内坐标系中各向的距离,以求得具体的坐标。
其次,分别通过设置于车辆两侧外的多个照射范围覆盖盲区范围的摄像头,进行图像采集,并采用AR技术,分别将车辆两侧外采集到的图像整合成驾驶员两侧A柱的盲区图像,为了方便驾驶员在驾驶时进行观测而不至于分心,该专利在A柱上集成了显示模块,可以显示盲区的图像。
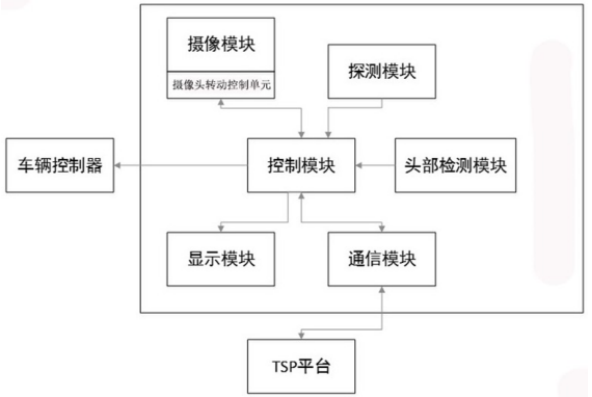
上图则为该系统的结构示意图,可以看到,该系统主要包括:探测模块、摄像模块、显示模块、控制模块、头部检测模块和摄像头转动控制单元。探测单元用于探测驾驶员两侧A柱的盲区范围;控制模块用于处理探测模块以及摄像模块的数据信息,并将结果通过显示模块进行输出;摄像头转动控制单元可以调整车辆两侧外摄像头的光轴,以使其照射范围覆盖A柱盲区范围。
以上就是哪吒汽车发明的搭载透明A柱的车辆盲区探测方案,该方案借助检测算法以及AR技术,能够完整呈现A柱盲区图像,从而避免了盲区的残留。不仅提高了行车安全,同时也能够提高驾驶者的视觉体验。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


