

【嘉勤点评】元戎启行的智能汽车传感器专利,通过生成实时三维立体模型,利用较少的传感器数量实现了对车辆周围360°环境信息的检测,结构简单成本低,提高了资源的利用率,有助于行驶安全。
集微网消息,L4自动驾驶技术公司元戎启行近日完成3亿美元B轮融资,深圳市福田区与元戎启行合作,正式为公众提供Robotaxi载人应用示范服务,元戎启行在福田区已经部署了20辆Robotaxi。
现有的L4级别无人驾驶汽车所采用的传感器布局主要包含两部分:车顶传感器模块和车身传感器模块。由于需要兼顾不同车顶传感器的检测范围,一般位于车顶上的传感器设置得相对集中,导致模块整体高度较高,体积较大。此外,由于安装车身传感器需要对车辆本身进行较多的改装设计,导致设计成本相对较高,而且安装难度较大。此外,由于传感器本身的限制,现有的设计常常需要增加传感器数量实现对车辆周围全方位环境的监测。
为此,元戎启行于2020年5月20日申请了一项名为“传感器模块及包括其的自动驾驶系统和车辆”的发明专利(申请号: 202080007594.2),申请人为深圳元戎启行科技有限公司。
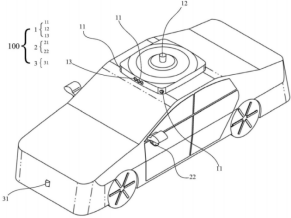
图1 安装有传感器模块的车辆透视图
图1为安装有传感器模块的车辆的透视图,传感器模块100包括:第一子传感器模块1,安装在车辆的顶部,能够获取车辆周围的环境物体的图像和车辆周围的物体距本车辆的第一距离,并生成图像信息和第一距离信息;第二子传感器模块2,可拆卸地设置在车辆的两侧,获取车辆周围的物体距本车辆的第二距离,并生成第二距离信息;以及第三子传感器模块3,位于车辆的前部的中央,可以获取车辆周围的物体距本车辆的第三距离,并生成第三距离信息。
其中,第一子传感器模块包括多个第一传感器11,呈放射状等角间隔布置。自动驾驶系统可通过信息处理单元和图形处理单元(GPU)处理图像信息、第一距离信息、第二距离信息和第三距离信息来生成本车辆周围的三维立体环境模型,并可根据该模型确定本车辆周围的环境特征,例如,确定本车辆周围是否存在行人、其他车辆、障碍物等及其距离本车辆的距离,交通灯的状态等,从而自动驾驶系统可通过控制中心生成相对应的指令,以使本车辆在遵守交通规则的前提下避开行人、其他车辆或障碍物,或者进行变道等,确保本车辆自动驾驶时的安全性。
在一个实施例中,第一子传感器模块的多个第一传感器相对于地面水平地设置在同一平面内,获取本车辆周围的环境物体的图像,以生成图像信息中的第一图像信息。此外,第一子传感器模块还可包括:第二传感器12,设置在第一子传感器模块1的中央,生成第一距离信息;以及至少一个第三传感器13,位于第一子传感器模块1的前侧的中部,并面向车辆的前方,来获取本车辆前方的交通灯的图像,以生成图像信息中的第二图像信息。
简而言之,元戎启行的智能汽车传感器专利,通过生成实时三维立体模型,利用较少的传感器数量实现了对车辆周围360°环境信息的检测,结构简单成本低,提高了资源的利用率,有助于行驶安全。
元戎启行凭借丰富的软硬件开发经验和前沿的研究成果,不断攻克技术难题,保障自动驾驶的安全。元戎启行将把自动驾驶推广到更广阔的应用领域,为人们提供更智能、更便捷的生活。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


